Da der Panzer ohne Probleme TÜV bekommen hat und erstmal nichts Dringendes anliegt (es ist ja sowieso viel zu kalt um draußen zu schrauben), haben wir uns wieder mal an Elektronik zu schaffen gemacht! (Für die Lesefaulen: ganz unten gibt es ein Video !)
Vor einigen Wochen hatten wir bereits mit einer sehr günstigen Syma X8C Drohne rumgespielt, aber leider schnell gemerkt, dass die Flugzeit sehr begrenzt war (ca. 7 min. mit Kamera), und diese Drohne das Gimbal (Kamera-Stabilisator) kaum tragen konnte.
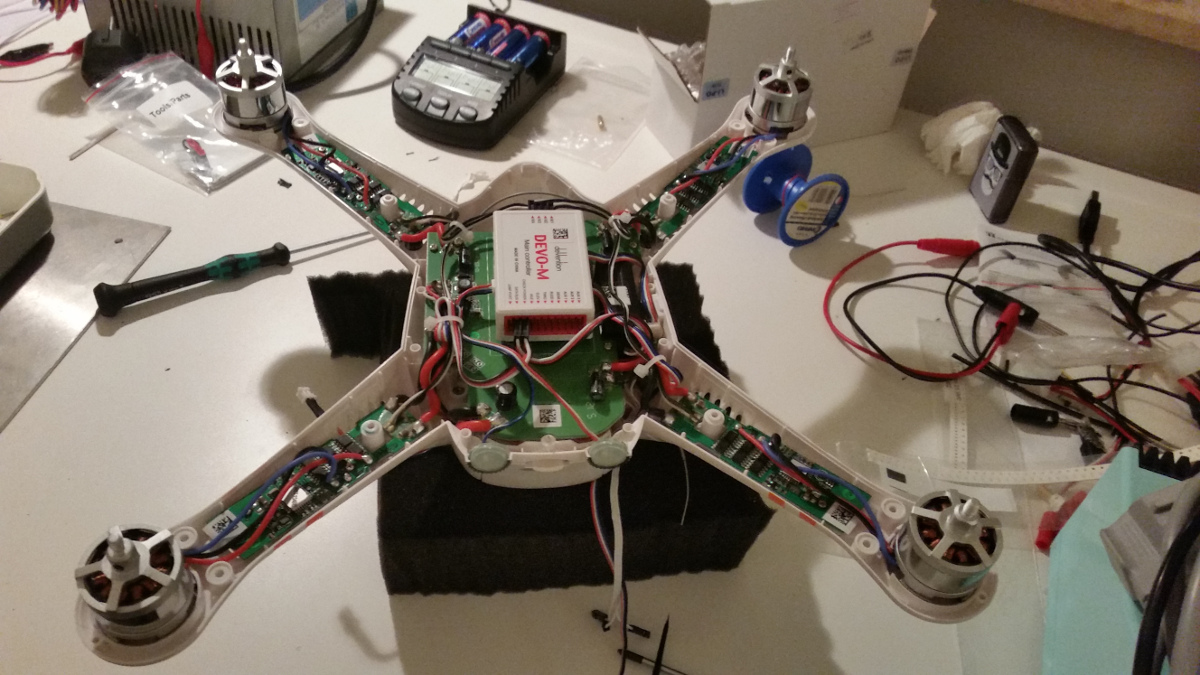
Also haben wir uns eine QR X350 Pro besorgt. Diese Drohne kann ca. 20 min. in der Luft bleiben, kommt schon mit GPS und diversen netten Funktionen. Auf Knopfdruck bleibt diese Drohne nämlich einfach so in der Luft stehen und korrigiert sich permanent, um diese Position nicht zu verlassen. Außerdem fliegt sie zu dem Punkt zurück an dem sie gestartet wurde und landet selbstständig, wenn der Funkkontakt zur Fernsteuerung abbricht oder der “Pilot” einen Schalter umlegt. Sie ist so gut motorisiert, dass sie mit Leichtigkeit unsere Kamera (Xiaomi Yi) mit dem Gimbal trägt (Walkera G2D), und die Fernsteuerung erlaubt uns außerdem, Pitch und Roll des Gimbals in der Luft zu steuern.

Einen Koffer zum Verstauen aller nötigen Sachen haben wir auch schon gebaut:

Das alles ist schon ziemlich nett, aber natürlich reicht uns das nicht ! Was könnte man mehr wollen ? Richtig ! Die Drohne soll autonom Wegpunkte abfliegen können, ein Follow-Me-Modus muss her (die Drohne soll uns automatisch mit der Kamera jagen wenn wir durch die Fjorde Norwegens brettern), und für die richtigen Beauty-Shots muss der Pilot natürlich auch in Echtzeit sehen können, was gerade aufgenommen wird. Also zurück an die Lötstation !
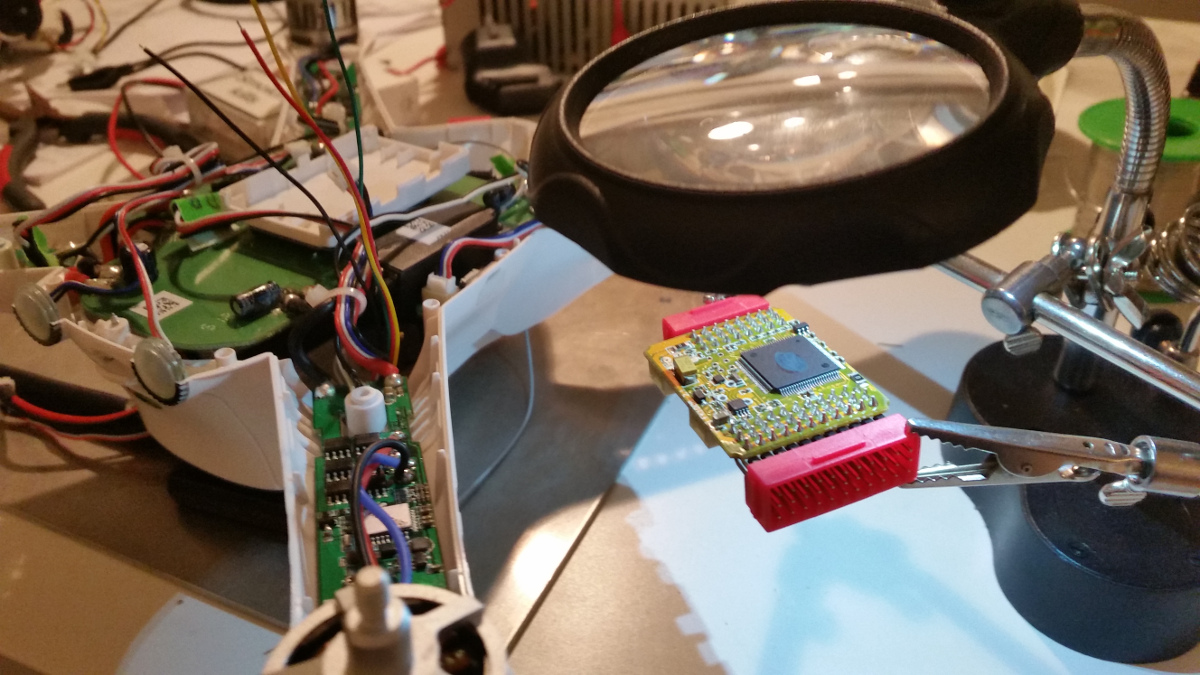
Leider verfügt der Flight-Controller der Drohne nicht über die Möglichkeit, direkt Telemetrie-Daten zu senden oder zu empfangen, deshalb haben wir ihn so umgelötet, dass er über die serielle Schnittstelle mittels eines Funkmoduls mit einer “Groundstation” kommunizieren kann. Dazu haben wir einige SMD-Widerstände getauscht (diese Mistdinger sind 0402-Bauart, d.h. die sind 1mm lang und 0.5mm dick, einmal falsch eingeatmet und die sind weg !).

Damit hätten wir jetzt das Problem mit dem automatischen Anfliegen von Wegpunkten, sowie dem Follow-Me-Modus geklärt. Unten im Video kann man alles in Live beim Testflug nochmal sehen, hier erstmal ein Bild vom Wegpunkt-Modus den wir mit einer App vom Handy gesteuert haben:

Jetzt fehlt uns noch das Live-Bild während des Fluges, das müssen wir natürlich auch per Funk übertragen. Dazu haben wir uns einen Immersion-Sender geholt und diesen an das AV-Out der Action-Kamera angeschlossen (die Xiaomi-Yi Action Kamera gibt über zwei Adern des USB-Anschlusses ein analoges Video-Signal ab). Mit einem geeigneten Empfänger kann man dann das Bild empfangen und entweder in den Laptop oder in eine FPV-Brille einspeisen (die “Brille” sieht kaum nerdig aus, links vom Laptop):

Und jetzt wie versprochen das ganze in Action beim ersten Testflug:
